Partial Derivative Calculator: How Partial Differentiation Works (2026)
Partial derivatives measure how a function changes in one direction while others are fixed. Rules, worked examples, gradient, and applications.

A partial derivative measures how a function changes when one variable increases while every other variable is held fixed. If f(x, y) = x^2 + 3xy + y^3, the partial derivative with respect to x tells you the rate of change in the x direction while y is frozen at its current value. The partial derivative with respect to y gives you the same information in the y direction while x is frozen.
This operation is the foundation for optimization in multiple dimensions, gradient descent in machine learning, and partial differential equations in physics. Use the Partial Derivative Calculator for step-by-step results. This guide covers how to calculate partial derivatives, second-order and mixed derivatives, the gradient vector, and how these concepts appear in real problems.
How to Calculate a Partial Derivative
The notation for partial derivatives uses the rounded symbol ∂ instead of the straight d of ordinary differentiation. ∂f/∂x means: differentiate f with respect to x, treating every other variable as a constant.
The rules are identical to single-variable calculus. Power rule, product rule, quotient rule, chain rule, all apply exactly as usual. The only change is interpretation: any variable you are not differentiating with respect to is treated as a fixed number.
Worked example 1:
f(x, y) = 3x^2 y + 2xy^3 - 5y^2
To find ∂f/∂x: treat y as a constant throughout.
- 3x^2 y: y is a constant multiplier, so differentiate x^2 using the power rule → 6xy
- 2xy^3: y^3 is a constant, derivative of x is 1 → 2y^3
- -5y^2: contains no x, so derivative = 0
∂f/∂x = 6xy + 2y^3
To find ∂f/∂y: treat x as a constant throughout.
- 3x^2 y: x^2 is a constant, derivative of y is 1 → 3x^2
- 2xy^3: x is a constant, power rule on y^3 → 6xy^2
- -5y^2: power rule on y^2 → -10y
∂f/∂y = 3x^2 + 6xy^2 - 10y
Worked example 2 (with trigonometric and exponential terms):
g(x, y) = x^2 sin(y) + e^x cos(y)
∂g/∂x:
- x^2 sin(y): sin(y) is a constant, differentiate x^2 → 2x sin(y)
- e^x cos(y): cos(y) is a constant, derivative of e^x is e^x → e^x cos(y)
∂g/∂x = 2x sin(y) + e^x cos(y)
∂g/∂y:
- x^2 sin(y): x^2 is a constant, derivative of sin(y) is cos(y) → x^2 cos(y)
- e^x cos(y): e^x is a constant, derivative of cos(y) is -sin(y) → -e^x sin(y)
∂g/∂y = x^2 cos(y) - e^x sin(y)
Second-Order and Mixed Partial Derivatives
Second-order partial derivatives differentiate twice. The notation distinguishes between differentiating the same variable twice and differentiating two different variables.
- ∂²f/∂x² (also written fxx): differentiate with respect to x, then again with respect to x
- ∂²f/∂y² (also written fyy): differentiate with respect to y, then again with respect to y
- ∂²f/∂y∂x (also written fxy): differentiate with respect to x first, then with respect to y
- ∂²f/∂x∂y (also written fyx): differentiate with respect to y first, then with respect to x
Clairaut's theorem: For functions whose second-order mixed partials are continuous, the order of differentiation does not matter: ∂²f/∂x∂y = ∂²f/∂y∂x. You can differentiate in whichever order is easier.
Example using f(x, y) = 3x^2 y + 2xy^3:
From earlier: ∂f/∂x = 6xy + 2y^3 and ∂f/∂y = 3x^2 + 6xy^2
Second-order partials:
∂²f/∂x^2 = ∂/∂x(6xy + 2y^3) = 6y
∂²f/∂y^2 = ∂/∂y(3x^2 + 6xy^2) = 12xy
Mixed partial (differentiate fx with respect to y): ∂²f/∂y∂x = ∂/∂y(6xy + 2y^3) = 6x + 6y^2
Mixed partial (differentiate fy with respect to x): ∂²f/∂x∂y = ∂/∂x(3x^2 + 6xy^2) = 6x + 6y^2
Both mixed partials equal 6x + 6y^2, confirming Clairaut's theorem.
The Gradient Vector
The gradient collects all first-order partial derivatives into a single vector. It is written ∇f (called "del f" or "grad f").
For f(x, y): ∇f = (∂f/∂x, ∂f/∂y)
For f(x, y, z): ∇f = (∂f/∂x, ∂f/∂y, ∂f/∂z)
What the gradient tells you:
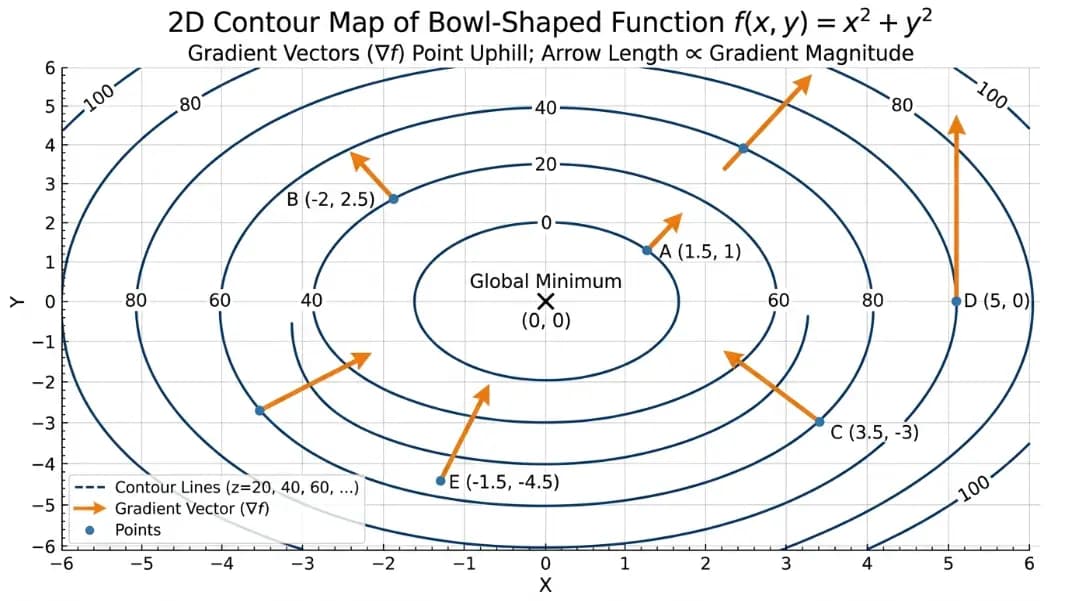
The gradient vector points in the direction of steepest increase of f at any given point. Its magnitude is the rate of increase in that direction. The negative gradient (-∇f) points in the direction of steepest decrease.
Example:
f(x, y) = x^2 + y^2
∂f/∂x = 2x, ∂f/∂y = 2y
At the point (3, 4): ∇f = (6, 8). The direction of steepest ascent from (3, 4) is the vector (6, 8). The magnitude (rate of increase in that direction) = sqrt(36 + 64) = sqrt(100) = 10.
Moving one unit in the direction (6/10, 8/10) from (3, 4) increases f by approximately 10 per unit of distance.
Gradient descent in machine learning:
In neural network training, the loss function L depends on millions of parameters (weights). To minimize L, training computes the gradient ∇L with respect to all weights simultaneously, then updates each weight by subtracting a small fraction of its partial derivative:
w_new = w_old - learning_rate x (∂L/∂w)
This single step, applied repeatedly, moves the parameters toward lower loss. The chain rule for partial derivatives makes it possible to compute ∂L/∂w for every weight efficiently, layer by layer from output to input. That process is backpropagation.
Finding Critical Points Using Partial Derivatives
To find local maxima, minima, or saddle points of f(x, y), set all first-order partial derivatives equal to zero and solve the resulting system.
Procedure:
- Compute ∂f/∂x and ∂f/∂y
- Set both equal to zero and solve for (x, y)
- Classify each critical point using the second derivative test
Second derivative test:
Compute D = (∂²f/∂x^2)(∂²f/∂y^2) - (∂²f/∂x∂y)^2
- D > 0 and ∂²f/∂x^2 > 0: local minimum
- D > 0 and ∂²f/∂x^2 < 0: local maximum
- D < 0: saddle point (neither min nor max)
- D = 0: the test gives no information
Worked example:
f(x, y) = x^2 - 4x + y^2 - 6y + 15
∂f/∂x = 2x - 4 = 0 → x = 2
∂f/∂y = 2y - 6 = 0 → y = 3
Critical point: (2, 3)
∂²f/∂x^2 = 2, ∂²f/∂y^2 = 2, ∂²f/∂x∂y = 0
D = (2)(2) - (0)^2 = 4 > 0, and ∂²f/∂x^2 = 2 > 0
(2, 3) is a local minimum. f(2, 3) = 4 - 8 + 9 - 18 + 15 = 2
Real Applications of Partial Derivatives
Heat equation: ∂u/∂t = k x ∂²u/∂x^2 describes how temperature u spreads through a material over time. The partial with respect to time on the left; the second partial with respect to position on the right. Every numerical weather model and thermal simulation solves variations of this equation.
Economics: If profit π depends on labor L and capital K, then ∂π/∂L is the marginal product of labor: the change in profit from hiring one more worker. Setting both ∂π/∂L and ∂π/∂K to zero finds the input combination that maximizes profit. This is standard constrained optimization in microeconomics.
Options pricing (the Greeks): Delta = ∂V/∂S is the partial derivative of an option's value with respect to the underlying stock price. Gamma = ∂²V/∂S^2 is the second partial. Theta, Vega, and Rho are all partial derivatives of option value with respect to other input variables (time, volatility, interest rate).
Fluid mechanics: The Navier-Stokes equations, which govern how fluids flow, are a system of partial differential equations involving partial derivatives of velocity with respect to position and time. Solving them numerically is the core challenge of computational fluid dynamics.
To find the partial derivative of f with respect to x, treat every other variable as a constant and apply the standard single-variable differentiation rules (power rule, chain rule, product rule, etc.). For f(x, y) = 3x^2 y + 2xy^3: ∂f/∂x = 6xy + 2y^3 (y treated as a fixed number throughout). ∂f/∂y = 3x^2 + 6xy^2 (x treated as a fixed number throughout). The mechanics are identical to ordinary calculus; only the interpretation of which variables are constant changes.
An ordinary derivative applies to a function of one variable: df/dx. A partial derivative applies to a function of multiple variables: ∂f/∂x, where f depends on x, y, z, and possibly more. When computing ∂f/∂x, all variables except x are treated as constants. The result is still a function of all variables, describing how f changes in the x direction at any given combination of the other variable values.
Clairaut's theorem states that if a function and its second-order mixed partial derivatives are continuous in a region, then ∂²f/∂x∂y = ∂²f/∂y∂x. The order of differentiation does not matter. For almost all functions encountered in applied mathematics and engineering, mixed partials are equal. This is useful because you can differentiate in whichever order is more convenient when computing a mixed partial.
The gradient vector ∇f = (∂f/∂x, ∂f/∂y, ...) points in the direction of steepest increase of f at any given point. Its magnitude equals the rate of increase in that direction. The negative gradient points in the direction of steepest decrease. Gradient descent optimization uses the negative gradient to iteratively update parameters toward lower values of a function, which is how neural networks are trained.
Set all first-order partial derivatives equal to zero simultaneously. Solve the resulting system for (x, y). Each solution is a critical point. Classify using the second derivative test: compute D = fxx*fyy - (fxy)^2 at the critical point. If D > 0 and fxx > 0, it is a local minimum. If D > 0 and fxx < 0, it is a local maximum. If D < 0, it is a saddle point. If D = 0, the test is inconclusive and other methods are needed.
A PDE is an equation involving a function of multiple variables and its partial derivatives. The heat equation ∂u/∂t = k ∂²u/∂x^2 is one example; the wave equation and Laplace's equation are others. PDEs describe phenomena where change occurs in multiple directions simultaneously: heat flow, wave propagation, fluid motion, and electromagnetic fields. Solving PDEs analytically is often impossible for complex geometries, which is why numerical methods and simulation software exist.
Written by
Hassaan Rasheed
Web Developer & Content Researcher
Hassaan builds calculators and writes research-backed guides on finance, math, payroll, and construction topics. Every number in his articles is sourced from official data and worked through by hand.
View LinkedIn Profile